

جڏهن توهان جو موبائيل بي پائلٽ گاڏي ڪنهن اونداهي خطي ۾ داخل ٿئي ٿي، هڪ مضبوط ۽ طاقتور نان لائين آف بصري ڪميونيڪيشن ريڊيو لنڪ روبوٽڪس کي ڪنٽرول سينٽر سان ڳنڍڻ جي ڪنجي آهي.جيIWAVEFD-6100 miniature OEM Tri-Band ڊجيٽل ip PCB حل ٽئين پارٽي جي سامان ۾ انضمام لاءِ هڪ مشن نازڪ ريڊيو آهي.اهو توهان جي خودمختيار نظام کي منهن ڏيڻ جي چئلينج کي منهن ڏيڻ ۽ رابطي جي حد کي وڌائڻ ۾ مدد ڏيڻ لاء ٺهيل آهي.
اچو ته ڳوليون ڇوFD-6100 BVLOS ڪميونيڪيشنڪوريج وڌايو ويو آهي ۽ مارڪيٽ تي ٻين ساڳين شين جي ڀيٽ ۾ وڏو، ۽ سکو ته ڪيئن جديد IWAVE ريڊيو توهان جي آپريشن لاءِ بي مثال مواصلاتي طاقت آڻيندو آهي.
اعلي حساسيت -103dbm@10Mhz
10Mhz بينڊوڊٿ تي قابل ذڪر -103dBm حساسيت سان، FD-6100 ڪميونيڪيشن کي برقرار رکي ٿو جيتوڻيڪ مشڪل ماحول ۾ ڪمزور سگنلن سان يا مداخلت سان.چاهي ڪنڪريٽ جي عمارتن جي اندر هجي يا جبلن جي علائقن ۾، FD-6100 جي شاندار حساسيت توهان جي خودمختيار غير انساني زميني گاڏين کي سسٽم جي ڪوريج جي ڪناري تي به ڳنڍيل رهڻ ۾ مدد ڪري ٿي.ھيٺ ڏنل آھي حساسيت جدول مختلف تعدد سان اسان جي عملي جاچ جي نتيجن جي بنياد تي.

| وصول ڪندڙ حساسيت (رسائي حالت) | حساسيت (BLER≤3٪) (ڊيٽا ٽرانسميشن اسٽيٽ) | |||||||
| 1.4GHZ | 20 ميگاز | -100 ڊي بي ايم | 1.4 GHz | 10MHz | -91dBm (10Mbps) | 2.4 GHz | 20 ميگاز | -94dBm (10Mbps) |
| 10MHZ | -103 ڊي بي ايم | 10MHz | -96dBm (5Mbps) | 20 ميگاز | -97dBm (5Mbps) | |||
| 5MHZ | -104 ڊي بي ايم | 5MHz | -82dBm (10Mbps) | 10 ميگاز | -91dBm (10Mbps) | |||
| 3MHZ | -106 ڊي بي ايم | 5MHz | -91dBm (5Mbps) | 10 ميگاز | -96dBm (5Mbps) | |||
| 800MHZ | 20 ميگاز | -100 ڊي بي ايم | 3MHz | -86dBm (5Mbps) | 5 ميگاز | -84dBm (10Mbps) | ||
| 10MHZ | -103 ڊي بي ايم | 3MHz | -97dBm (2Mbps) | 5 ميگاز | -93dBm (5Mbps) | |||
| 5MHZ | -104 ڊي بي ايم | 2MHz | -84dBm (2Mbps) | 3 ميگاز | -87dBm (5Mbps) | |||
| 3MHZ | -106 ڊي بي ايم | 800Mhz | 10MHz | -91dBm (10Mbps) | 3 ميگاز | -98dBm (2Mbps) | ||
| 2.4GHZ | 20 ميگاز | -99 ڊي بي ايم | 10MHz | -97dBm (5Mbps) | 1.4 GHz | -84dBm (2Mbps) | ||
| 10MHZ | -103 ڊي بي ايم | 5MHz | -84dBm (10Mbps) | |||||
| 5MHZ | -104 ڊي بي ايم | 5MHz | -94dBm (5Mbps) | |||||
| 3MHZ | -106 ڊي بي ايم | 3MHz | -87dBm (5Mbps) | |||||
| 3MHz | -98dBm (2Mbps) | |||||||
| 2MHz | -84dBm (2Mbps) | |||||||
مخالف multipath مداخلت الگورتھم
اونچين عمارتن، پيچيده خطن، يا ٻين رڪاوٽن مان سگنل جي عڪاسي جي ڪري ملٽي پاٿ مداخلت موثر رابطي کي روڪي سگھي ٿي.IWAVE FD-6100 وڊيو ۽ ڊيٽا جي بيحد ۽ مستحڪم ٽرانسميشن کي يقيني بڻائڻ لاءِ ترقي يافته اينٽي ملٽي پيٿ مداخلت واري الگورتھم کي اختيار ڪري ٿو، ان کان سواءِ ماحولياتي ڪيترو به مشڪل هجي.multipath مداخلت جي اثر کي گھٽائڻ سان، هي مضبوطIP MESH ريڊيوهڪ قابل اعتماد ۽ اعليٰ ترو پُٽ ڪميونيڪيشن مهيا ڪري ٿي، ان کي مختلف خود مختيار انسانن جي نظام لاءِ پهريون انتخاب بڻائي ٿو جهڙوڪ تاکتياتي روبوٽ، فائر فائٽنگ روبوٽ، آل ٽرين گاڏي وغيره.
فريڪوئنسي هاپنگ اسپريڊ اسپريڪٽرم (FHSS)
FD-6100 فریکوئنسي هاپنگ کي سپورٽ ڪري ٿو.۽ اهو 100hops في سيڪنڊ جي رفتار سان.
FHHS فریکوئنسي هاپنگ ٺهيل الورورٿم طرفان طئي ڪئي وئي آهي.الورورٿم حقيقي وقت جي مداخلت واري صورتحال جي بنياد تي هڪ بهترين فريڪوئنسي پوائنٽ چونڊيندو ۽ پوءِ ڪم ڪرڻ دوران وائرليس ڪميونيڪيشن لنڪ کي مداخلت کان پاڪ ڪرڻ لاءِ FHSS کي ان بهترين فريڪوئنسي پوائنٽ ڏانهن ڇڪڻ لاءِ عمل ڪندو.
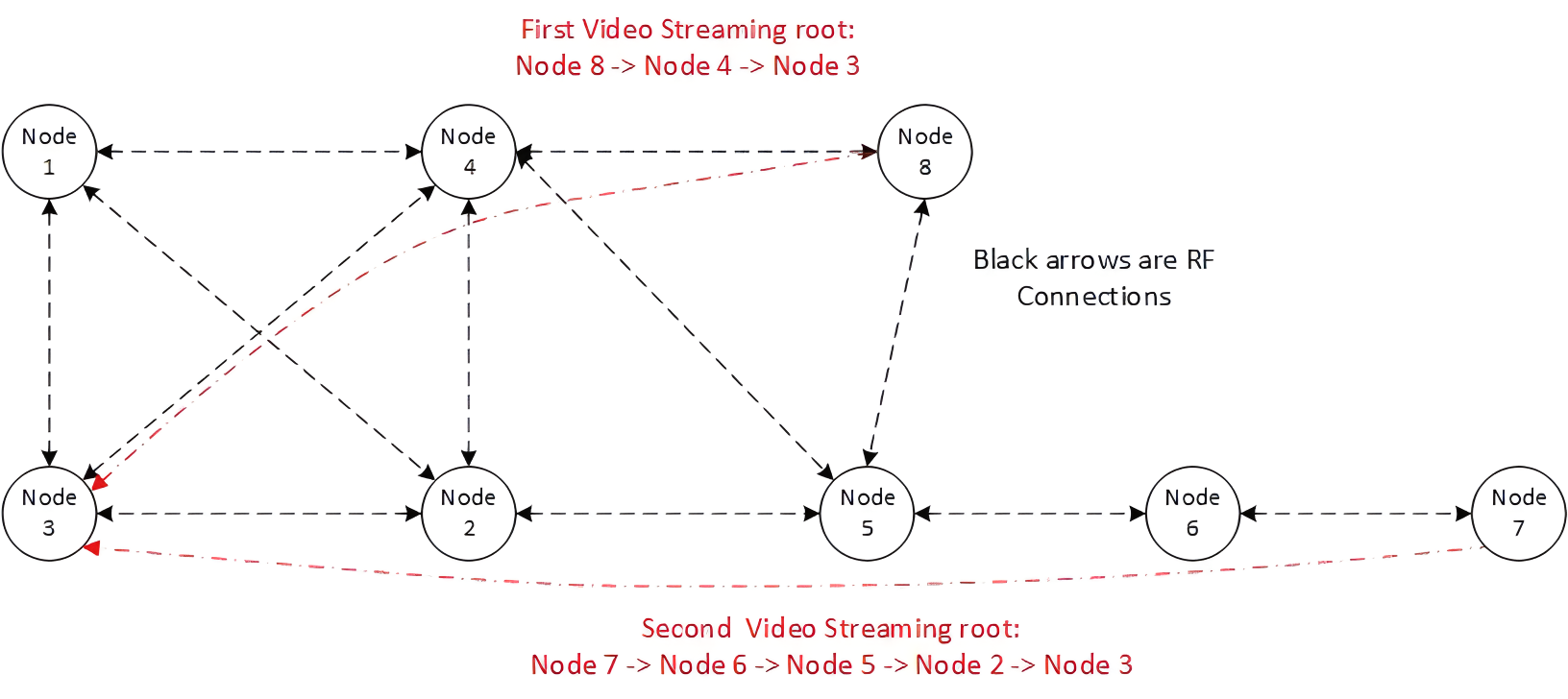
خود ٺاھڻ ۽ خود شفا ڏيڻ MESH نيٽ ورڪنگ
جڏهن روبوٽ پيچيده ڪم انجام ڏين ٿا جيئن ته موبائل روبوٽ (بعدم گرائونڊ گاڏي، يا UGV) مان هڪ کان وڌيڪ وڊيو اسٽريمنگ کي واپس ڪنٽرول اسٽيشن ڏانهن وٺي وڃن، جنهن لاءِ هڪ اعليٰ بينڊ ويڊٿ ڪميونيڪيشن لنڪ جي ضرورت هوندي آهي.تنهن هوندي به جيڪڏهن ڪميونيڪيشن لنڪ صرف ڪم ڪري ٿي نظر جي لڪير تي، اڪثر ڪري روبوٽ جي حرڪت جي لچڪ کي محدود ڪري ٿي.FD-6100 هڪ MESH نيٽورڪ روبوٽ-ماؤنٽبل ماڊل آهي.توهان نيٽ ورڪ کي رلي ڪرڻ لاءِ ڪيترن ئي رلي نوڊس کي ترتيب ڏئي سگهو ٿا جڏهن ۽ ڪٿي مواصلاتي ڪوريج کي وڌائڻ جي ضرورت آهي.
FD-6100 هڪ جامع فيصلو ڪندو جيڪو سگنل جي معيار جي بنياد تي ڀرپاسي نوڊس ۽ بهتر روٽنگ الگورتھم جي وچ ۾، پوءِ وڊيو ۽ ڊيٽا کي منتقل ڪرڻ لاءِ بهترين رستو چونڊيو.
ٽي-بينڊ فريکوئنسي
ٽري بينڊ اينٽينا سان ڳنڍيل، FD-6100 فريڪوئنسي ڪراس بينڊ کي 1.4Ghz کان 800Mhz کان 2.4Ghz تائين اينٽي جيمنگ لاءِ هاپ ڪري سگهي ٿو ۽ يو جي وي ۽ ڪنٽرول اسٽيشن جي وچ ۾ مستحڪم ۽ مضبوط وائرليس لنڪ جي ضمانت ڏئي ٿو.
IWAVE FD-6100 ننڍو HD وائرليس وڊيو ٽرانسميٽر روبوٽڪس لاءِ پلگ ۽ پلے حل فراهم ڪري ٿو.ان سان توهان هڪ بي ترتيب ڊگهي فاصلي وائرليس ڪميونيڪيشن لنڪ برقرار رکي سگهو ٿا.
FD-6100 MESH ريڊيو بابت وڌيڪ تفصيلي معلومات لاء، مهرباني ڪري هيٺ ڏنل صفحي جو دورو ڪريو:


پوسٽ ٽائيم: نومبر-30-2023




