소형 OEM 3대역 디지털 IP MESH 데이터 링크
●자체 형성 및 자가 치유 능력
FD-61MN은 하나 이상의 노드가 손실되더라도 연속성을 제공하는 독특한 분산형 아키텍처를 통해 노드가 언제든지 가입하거나 탈퇴할 수 있는 지속적으로 적응하는 메시 네트워크를 구축합니다.
●강력한 안정적인 데이터 전송 능력
신호가 변할 때 전송 속도에 큰 지터가 발생하는 것을 방지하기 위해, 신호 품질에 따라 코딩 및 변조 방식을 자동으로 전환하는 코딩 적응형 기술을 사용합니다.
●장거리 통신
1. 강력한 NLOS 능력
2. 무인 지상 차량의 경우 시야가 확보되지 않은 1km~3km
3. 무인 항공기의 경우 공대지 10km
●UAV 군집 또는 UGV 함대를 정확하게 제어
직렬 포트 1: IP(주소+포트)를 통해 (직렬 데이터)를 송수신하여, 하나의 제어 센터에서 여러 대의 UAV 또는 UGV를 정밀하게 제어할 수 있습니다.
직렬 포트 2: 투명 전송 및 브로드캐스트 송수신 제어 데이터
●관리가 간편합니다
1. 모든 노드를 관리하고 토폴로지, SNR, RSSI, 노드 간 거리 등을 실시간으로 모니터링하는 관리 소프트웨어
2. 제3자 무인 플랫폼 연동을 위한 API 제공
3. 자체 구성 네트워크이며 작업 중 사용자 상호 작용이 필요하지 않습니다.
●안티재밍
주파수 호핑, 적응 변조, 적응형 RF 송신 전력 및 MANET 라우팅은 전자전 상황에서도 연결성을 보장합니다.
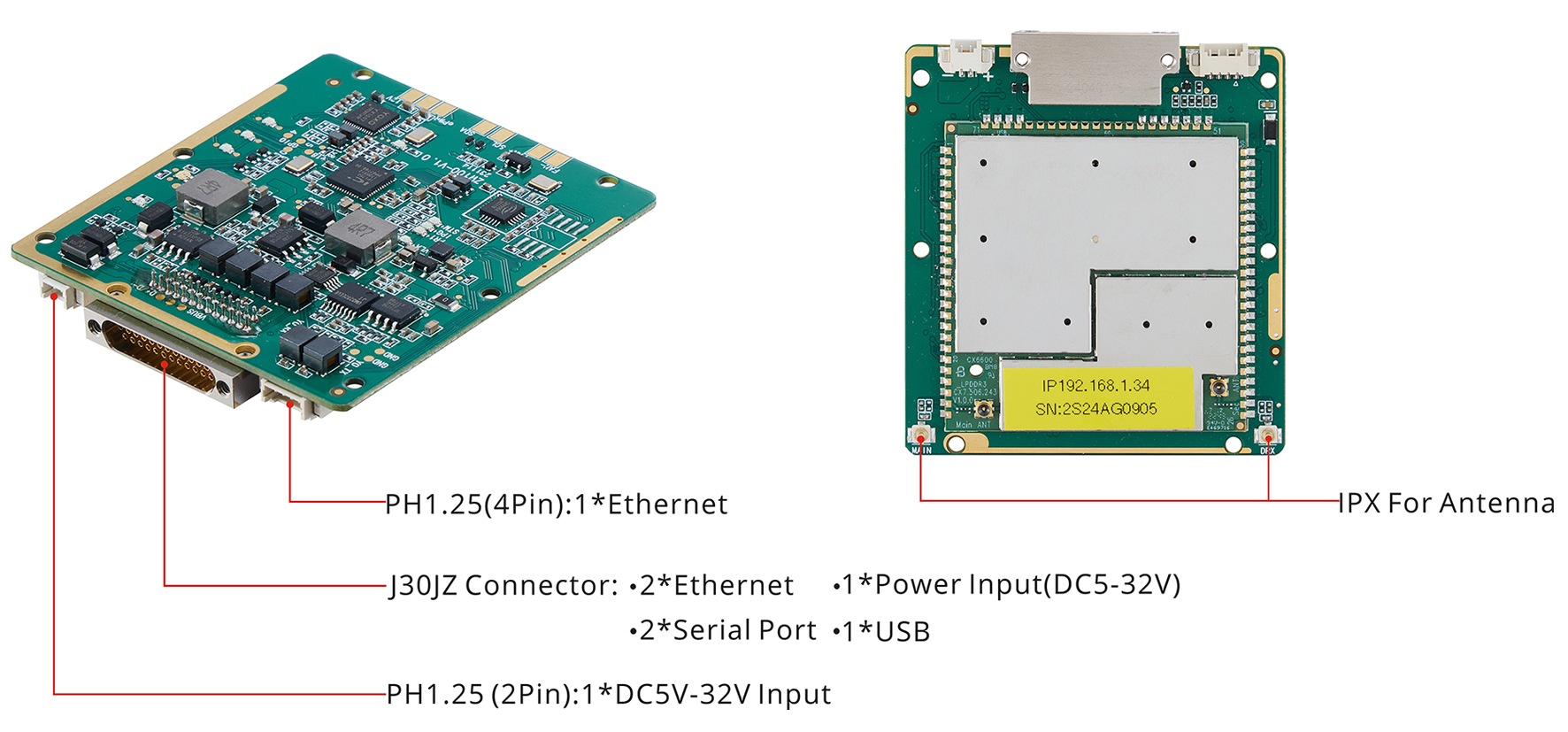
●3개의 이더넷 포트
3개의 이더넷 포트를 통해 FD-61MN은 카메라, 온보드 PC, 센서 등 다양한 데이터 장치에 액세스할 수 있습니다.
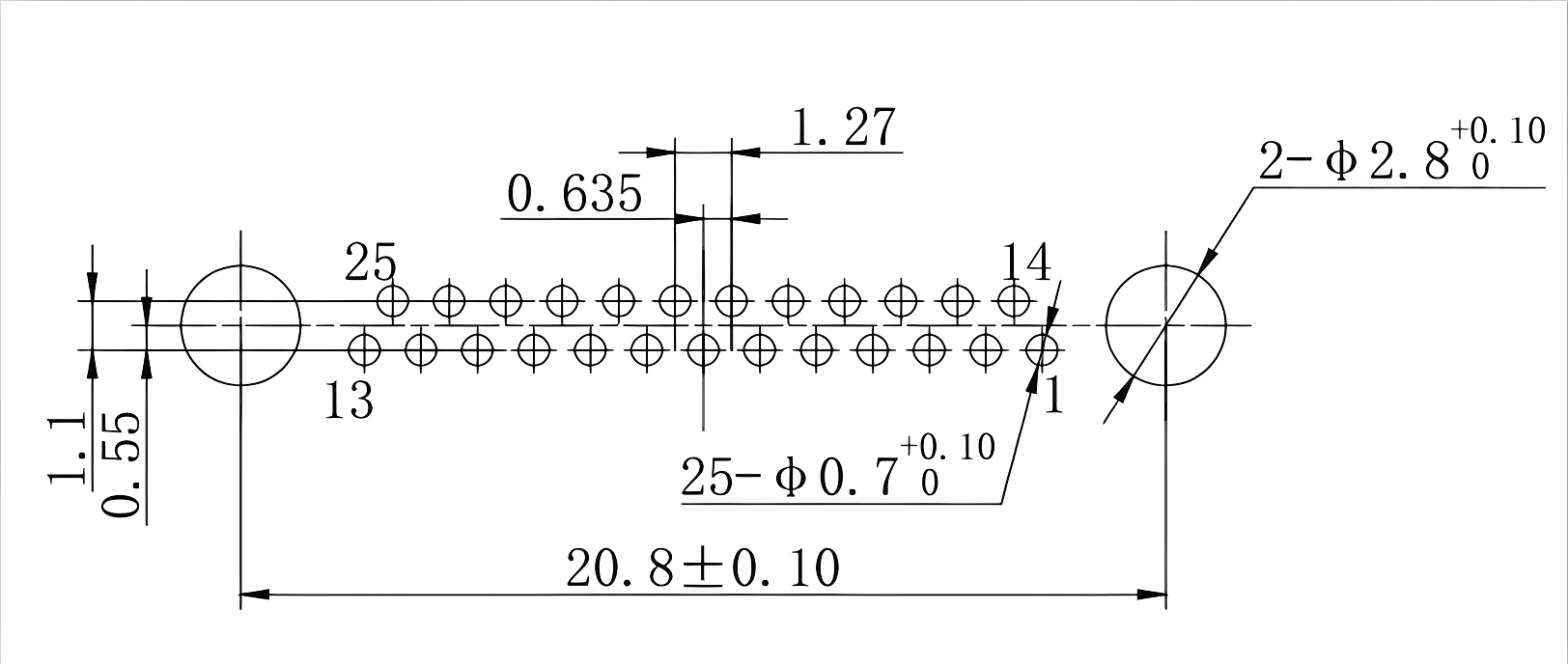
●고수준의 항공 플러그인 인터페이스
1. J30JZ 커넥터는 설치 공간이 작고, 무게가 가볍고, 연결 신뢰성이 뛰어나고, 전자파 차폐가 우수하고, 충격 저항성이 뛰어나 안정적이고 신뢰할 수 있는 통신을 보장합니다.
2. 다양한 연결 및 통신 요구 사항을 충족하기 위해 다양한 핀과 소켓을 구성합니다.
●보안
1. ZUC/SNOW3G/AES128 암호화
2. 최종 사용자가 비밀번호를 정의하도록 지원
●넓은 전원 입력
폭넓은 전압 입력: DV5-32V
●간편한 통합을 위한 소형 디자인
1. 치수: 60*55*5.7mm
2. 무게 : 26g
3. IPX RF Pot: 기존 SMA 커넥터를 대체하여 공간 절약을 위해 IPX를 채택했습니다.
4. J30JZ 커넥터는 작은 공간 요구 사항에 대한 통합을 위해 많은 속도를 절약합니다.
| J30JZ 정의: | |||||||
| 핀 | 이름 | 핀 | 이름 | 핀 | 이름 | 핀 | 이름 |
| 1 | TX0+ | 11 | D- | 21 | UART0_RX | 24 | 접지 |
| 2 | TX0- | 12 | 접지 | 22 | 신병 | 25 | DC 차량 식별 번호 |
| 3 | 접지 | 13 | DC 차량 식별 번호 | 23 | 비바트 | ||
| 4 | TX4- | 14 | RX0+ | PH1.25 4PIN 정의: | |||
| 5 | TX4+ | 15 | RX0- | 핀 | 이름 | 핀 | 이름 |
| 6 | RX4- | 16 | RS232_TX | 1 | RX3- | 3 | TX3- |
| 7 | RX4+ | 17 | RS232_RX | 2 | RX3+ | 4 | TX3+ |
| 8 | 접지 | 18 | COM_TX | ||||
| 9 | V버스 | 19 | COM_RX | ||||
| 10 | D+ | 20 | UART0_TX | ||||
●드론, UAV, UGV, USV를 위한 고급 무선 비디오 및 데이터 링크
●FD-61MN은 보안 및 방위 분야의 고도로 이동성이 뛰어난 전술 부대에 IP 기반 HD 비디오 및 데이터 서비스를 제공합니다.
●FD-61MN은 다양한 로봇 시스템에 플랫폼을 통합하기 위한 OEM(베어보드) 포맷입니다.
●FD-61MN은 IP 주소와 IP 포트를 통해 원격 측정 제어 데이터를 수신하고 전송하여 다중 로봇 시스템의 각 장치를 정확하게 제어할 수 있습니다.
●부스터 증폭기를 추가하면 추가 범위를 얻을 수 있습니다.

| 일반적인 | ||
| 기술 | TD-LTE 무선 기술 표준을 기반으로 한 MESH | |
| 암호화 | ZUC/SNOW3G/AES(128/256) OptionalLayer-2 | |
| 데이터 속도 | 30Mbps(업링크 및 다운링크) | |
| 시스템 속도의 적응적 평균 분포 | ||
| 사용자가 속도 제한을 설정할 수 있도록 지원 | ||
| 범위 | 10km(공대지) 500m-3km(NLOS 지상간) | |
| 용량 | 32노드 | |
| 대역폭 | 1.4MHz/3MHz/5MHz/10MHz/20MHz | |
| 힘 | 25dBm±2(요청 시 2w 또는 10w) | |
| 조정 | QPSK, 16QAM, 64QAM | |
| 안티 재밍 | 자동 크로스밴드 주파수 호핑 | |
| 전력 소비 | 평균: 4-4.5와트 최대: 8와트 | |
| 전원 입력 | DC5V-32V | |
| 수신기 감도 | 감도(BLER≤3%) | ||||
| 2.4GHz | 20MHz | -99dBm | 1.4GHz | 10MHz | -91dBm(10Mbps) |
| 10MHz | -103dBm | 10MHz | -96dBm(5Mbps) | ||
| 5MHz | -104dBm | 5MHz | -82dBm(10Mbps) | ||
| 3MHz | -106dBm | 5MHz | -91dBm(5Mbps) | ||
| 1.4GHz | 20MHz | -100dBm | 3MHz | -86dBm(5Mbps) | |
| 10MHz | -103dBm | 3MHz | -97dBm(2Mbps) | ||
| 5MHz | -104dBm | 2MHz | -84dBm(2Mbps) | ||
| 3MHz | -106dBm | 800MHz | 10MHz | -91dBm(10Mbps) | |
| 800MHz | 20MHz | -100dBm | 10MHz | -97dBm(5Mbps) | |
| 10MHz | -103dBm | 5MHz | -84dBm(10Mbps) | ||
| 5MHz | -104dBm | 5MHz | -94dBm(5Mbps) | ||
| 3MHz | -106dBm | 3MHz | -87dBm(5Mbps) | ||
| 3MHz | -98dBm(2Mbps) | ||||
| 2MHz | -84dBm(2Mbps) | ||||
| 주파수 대역 | |||||||
| 1.4GHz | 1427.9-1447.9MHz | ||||||
| 800MHz | 806-826MHz | ||||||
| 2.4GHz | 2401.5-2481.5MHz | ||||||
| 무선 전화 | |||||||
| 통신 모드 | 유니캐스트, 멀티캐스트, 브로드캐스트 | ||||||
| 전송 모드 | 풀 듀플렉스 | ||||||
| 네트워킹 모드 | 자기 치유 | 자기 적응, 자기 조직화, 자기 구성, 자기 유지 관리 | |||||
| 동적 라우팅 | 실시간 링크 상황에 따라 경로를 자동으로 업데이트합니다. | ||||||
| 네트워크 제어 | 국가 모니터링 | 연결 상태 /rsrp/snr/distance/업링크 및 다운링크 처리량 | |||||
| 시스템 관리 | WATCHDOG: 모든 시스템 수준 예외를 식별하고 자동으로 재설정할 수 있습니다. | ||||||
| 재전송 | L1 | 전송되는 데이터의 종류에 따라 재전송 여부를 결정합니다. (AM/UM); HARQ 재전송 | |||||
| L2 | HARQ 재전송 | ||||||
| 인터페이스 | ||
| RF | 2 x IPX | |
| 이더넷 | 3x이더넷 | |
| 직렬 포트 | 3x 직렬 포트 | |
| 전원 입력 | 2*전원 입력(대체) | |
| 기계적인 | ||
| 온도 | -40℃~+80℃ | |
| 무게 | 26그램 | |
| 차원 | 60*55*5.7mm | |
| 안정 | MTBF≥10000시간 | |
●데이터 서비스를 위한 강력한 직렬 포트 기능
1. 고속 직렬 포트 데이터 전송: 보드 속도는 최대 460800입니다.
2. 직렬 포트의 다양한 작업 모드: TCP 서버 모드, TCP 클라이언트 모드, UDP 모드, UDP 멀티캐스트 모드, 투명 전송 모드 등.
3. MQTT, Modbus 및 기타 프로토콜. 직렬 포트 IoT 네트워킹 모드를 지원하여 네트워킹에 유연하게 활용할 수 있습니다. 예를 들어, 사용자는 브로드캐스트 또는 멀티캐스트 모드 대신 원격 컨트롤러를 통해 다른 노드(드론, 로봇견 또는 기타 무인 로봇)에 제어 명령을 정확하게 전송할 수 있습니다.
| 데이터 전송 제어 | |||||
| 명령 인터페이스 | AT 명령 구성 | AT 명령 구성을 위한 VCOM 포트/UART 및 기타 포트 지원 | |||
| 구성 | WEBUI, API 및 소프트웨어를 통한 지원 구성 | ||||
| 작업 모드 | TCP 서버 모드 TCP 클라이언트 모드 UDP 모드 UDP 멀티캐스트 MQTT 모드버스 | ●TCP 서버로 설정하면 직렬 포트 서버는 컴퓨터 연결을 기다립니다. ●TCP 클라이언트로 설정하면 직렬 포트 서버는 대상 IP로 지정된 네트워크 서버에 대한 연결을 적극적으로 시작합니다. ●TCP 서버, TCP 클라이언트, UDP, UDP 멀티캐스트, TCP 서버/클라이언트 공존, MQTT | |||
| 전송 속도 | 1200, 2400, 4800, 7200, 9600, 14400, 19200, 28800, 38400, 57600, 76800, 115200, 230400, 460800 | ||||
| 전송 모드 | 패스스루 모드 | ||||
| 규약 | 이더넷, IP, TCP, UDP, HTTP, ARP, ICMP, DHCP, DNS, MQTT, Modbus TCP, DLT/645 | ||||