導入
1. RF および伝送性能テスト
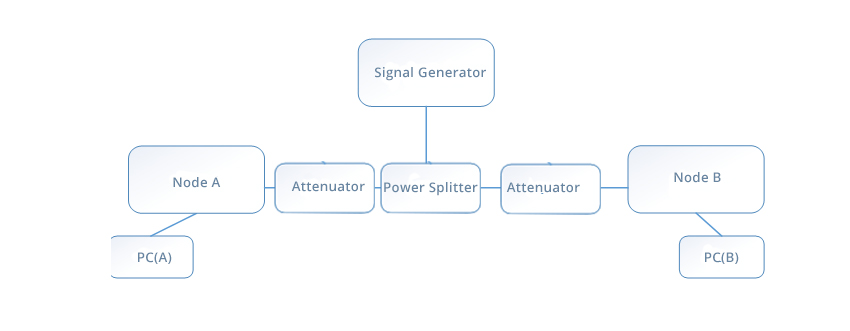
右図に従ってテスト環境を構築します。テスト機器は Agilent E4408B です。ノード A とノード B はテスト対象のデバイスです。RF インターフェイスは減衰器を介して接続され、データを読み取るためにパワー スプリッターを介してテスト機器に接続されます。このうちノード A は、ロボット通信モジュール、ノード B はゲートウェイ通信モジュールです。

テスト環境接続図
| テスト結果 | |||
| Nu琥珀色 | 検知項目 | 検出プロセス | 検出結果 |
| 1 | パワー表示 | 電源投入後、インジケーターライトが点灯します | 通常 ☑Un普通□ |
| 2 | 動作帯域 | WebUI を介してノード A および B にログインし、設定インターフェイスに入り、動作周波数帯域を 1.4GHz (1415 ~ 1540MHz) に設定します。次に、スペクトラム アナライザを使用してメイン周波数ポイントと占有周波数を検出し、デバイスがサポートしていることを確認します。 1.4GHz。 | 通常 ☑Un普通□ |
| 3 | 帯域幅調整可能 | WebUI を介してノード A と B にログインし、設定インターフェイスに入り、それぞれ 5MHz、10MHz、20MHz を設定し (ノード A とノード B は設定の一貫性を保ちます)、スペクトラム アナライザで送信帯域幅が設定と一致しているかどうかを観察します。 。 | 通常 ☑Un普通□ |
| 4 | 調整可能なパワー | WebUI を介してノード A および B にログインし、設定インターフェイスに入り、出力電力を設定し (それぞれ 3 つの値を設定)、スペクトル アナライザを介して送信帯域幅が設定と一致しているかどうかを観察します。 | 正常 ☑異常□ |
| 5 | 暗号化通信 | WebUI を介してノード A と B にログインし、設定インターフェイスに入り、暗号化方式を AES128 に設定し、キーを設定します (ノード A と B の設定は一貫したままです)。データ送信が正常であることが確認されます。 | 通常 ☑Un普通□ |
| 6 | ロボットエンドの消費電力 | 電力アナライザーを介して、通常の送信モードでロボット側のノードの平均消費電力を記録します。 | 平均消費電力: < 15w |
2. データレートと遅延のテスト
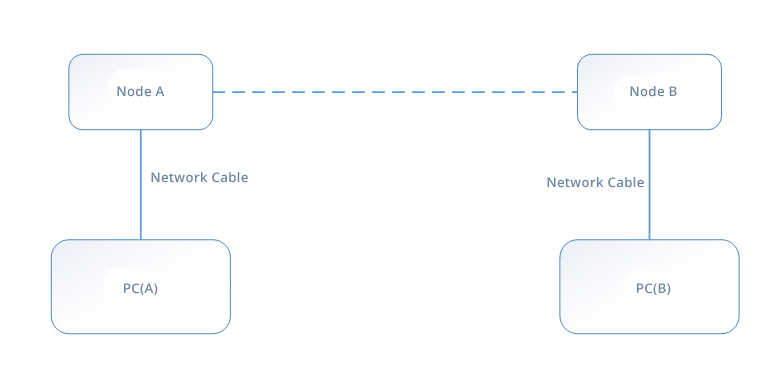
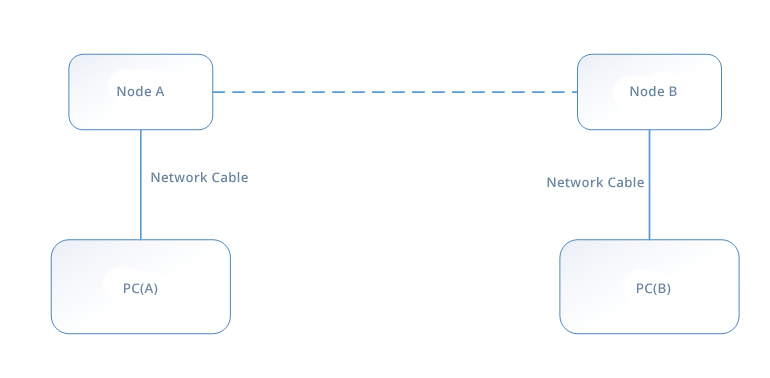
テスト方法: ノード A と B (ノード A はハンドヘルド端末、ノード B は無線伝送ゲートウェイ) は、環境内の干渉周波数帯域を避けるためにそれぞれ 1.4 GHz と 1.5 GHz で適切な中心周波数を選択し、最大 20 MHz の帯域幅を構成します。ノード A と B は、それぞれネットワーク ポートを介して PC(A) と PC(B) に接続されています。PC(A)のIPアドレスは192.168.1.1です。PC(B)のIPアドレスは192.168.1.2です。両方の PC に iperf 速度テスト ソフトウェアをインストールし、次のテスト手順を実行します。
●PC上でiperf-sコマンドを実行する(A)
●PC(B)でコマンド iperf -c 192.168.1.1 -P 2 を実行します。
●上記試験方法に従い、20回の試験結果を記録し、平均値を算出します。
| テストR結果 | |||||
| 番号 | プリセットされた試験条件 | テスト結果(Mbps) | 番号 | プリセットされた試験条件 | テスト結果 (Mbps) |
| 1 | 1450MHz@20MHz | 88.92 | 11 | 1510MHz@20MHz | 88.92 |
| 2 | 1450MHz@20MHz | 90.11 | 12 | 1510MHz@20MHz | 87.93 |
| 3 | 1450MHz@20MHz | 88.80 | 13 | 1510MHz@20MHz | 86.89 |
| 4 | 1450MHz@20MHz | 89.88 | 14 | 1510MHz@20MHz | 88.32 |
| 5 | 1450MHz@20MHz | 88.76 | 15 | 1510MHz@20MHz | 86.53 |
| 6 | 1450MHz@20MHz | 88.19 | 16 | 1510MHz@20MHz | 87.25 |
| 7 | 1450MHz@20MHz | 90.10 | 17 | 1510MHz@20MHz | 89.58 |
| 8 | 1450MHz@20MHz | 89.99 | 18 | 1510MHz@20MHz | 78.23 |
| 9 | 1450MHz@20MHz | 88.19 | 19 | 1510MHz@20MHz | 76.86 |
| 10 | 1450MHz@20MHz | 89.58 | 20 | 1510MHz@20MHz | 86.42 |
| 平均無線伝送速度: 88.47 Mbps | |||||
3. 遅延テスト
テスト方法: ノード A と B (ノード A はハンドヘルド端末、ノード B は無線伝送ゲートウェイ) で、環境無線干渉帯域を避けるためにそれぞれ 1.4 GHz と 1.5 GHz の適切な中心周波数を選択し、20 MHz 帯域幅を構成します。ノード A と B は、それぞれネットワーク ポートを介して PC(A) と PC(B) に接続されています。PC(A)のIPアドレスは192.168.1.1、PC(B)のIPアドレスは192.168.1.2です。次のテスト手順を実行します。
●PC (A) でコマンド ping 192.168.1.2 -I 60000 を実行し、A から B へのワイヤレス伝送遅延をテストします。
●PC (B) でコマンド ping 192.168.1.1 -I 60000 を実行し、B から A へのワイヤレス伝送遅延をテストします。
●上記試験方法に従い、20回の試験結果を記録し、平均値を算出します。
| テスト結果 | |||||||
| 番号 | プリセットされた試験条件 | PC(A)B への遅延 (ミリ秒) | PC(B)から A までのレイテンシ (ミリ秒) | 番号 | プリセットされた試験条件 | PC(A)B への遅延 (ミリ秒) | PC(B)から A までのレイテンシ (ミリ秒) |
| 1 | 1450MHz@20MHz | 30 | 29 | 11 | 1510MHz@20MHz | 28 | 26 |
| 2 | 1450MHz@20MHz | 31 | 33 | 12 | 1510MHz@20MHz | 33 | 42 |
| 3 | 1450MHz@20MHz | 31 | 27 | 13 | 1510MHz@20MHz | 30 | 36 |
| 4 | 1450MHz@20MHz | 38 | 31 | 14 | 1510MHz@20MHz | 28 | 38 |
| 5 | 1450MHz@20MHz | 28 | 30 | 15 | 1510MHz@20MHz | 35 | 33 |
| 6 | 1450MHz@20MHz | 28 | 26 | 16 | 1510MHz@20MHz | 60 | 48 |
| 7 | 1450MHz@20MHz | 38 | 31 | 17 | 1510MHz@20MHz | 46 | 51 |
| 8 | 1450MHz@20MHz | 33 | 35 | 18 | 1510MHz@20MHz | 29 | 36 |
| 9 | 1450MHz@20MHz | 29 | 28 | 19 | 1510MHz@20MHz | 29 | 43 |
| 10 | 1450MHz@20MHz | 32 | 36 | 20 | 1510MHz@20MHz | 41 | 50 |
| 平均無線伝送遅延: 34.65 ms | |||||||
4. 耐ジャミングテスト
上図に従ってテスト環境をセットアップします。ノード A が無線伝送ゲートウェイ、B がロボット無線伝送ノードです。ノード A と B を 5MHz の帯域幅に設定します。
A と B が通常のリンクを確立した後。WEB UIのDPRPコマンドで現在の動作周波数を確認してください。信号発生器を使用して、この周波数ポイントで 1MHz 帯域幅の干渉信号を生成します。信号強度を徐々に増加させ、動作周波数の変化をリアルタイムでクエリします。
| シーケンス番号 | 検知項目 | 検出プロセス | 検出結果 |
| 1 | アンチジャミング機能 | 信号発生器を通じて強い干渉がシミュレートされると、ノード A と B は周波数ホッピング メカニズムを自動的に実行します。WEB UIのDPRPコマンドにより、動作周波数ポイントが1465MHzから1480MHzに自動的に切り替わったことを確認できます。 | 正常 ☑異常□ |
投稿日時: 2024 年 3 月 22 日